
Any opinions on "Toward Data Science" moving off of Medium.com? Wonder how many authors have published on TDS because it was on Medium.
04.02.2025 03:23
👍 0
🔁 0
💬 0
📌 0
Any opinions on "Toward Data Science" moving off of Medium.com? Wonder how many authors have published on TDS because it was on Medium.
Deep Seek just released the multi-modal model Janus-Pro github.com/deepseek-ai/...
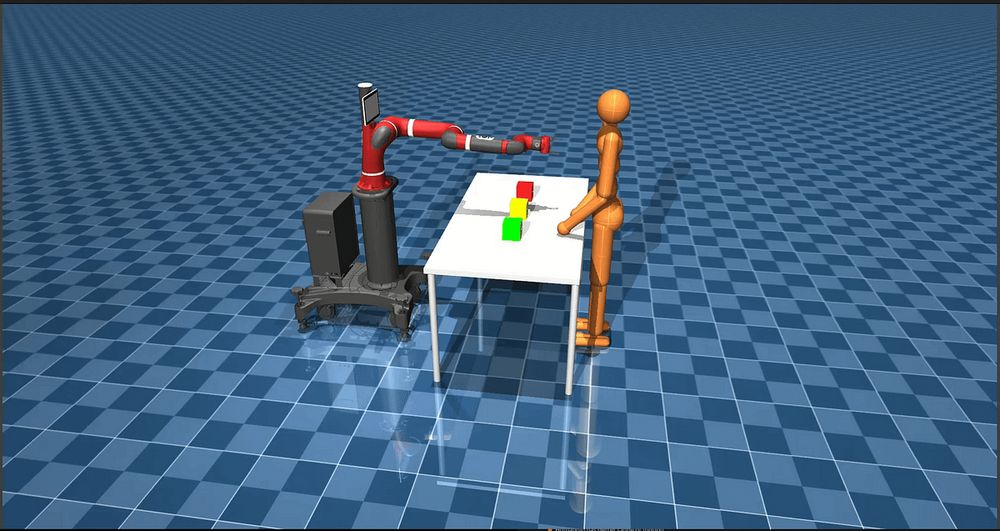
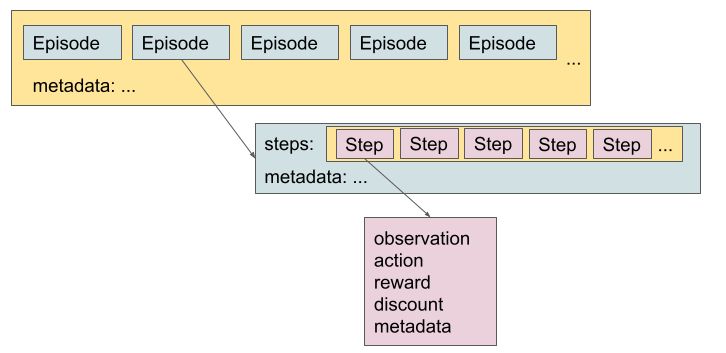
End-to-end learning datasets should include negative examples, check out James Watson’s block-stacking dataset medium.com/correll-l...
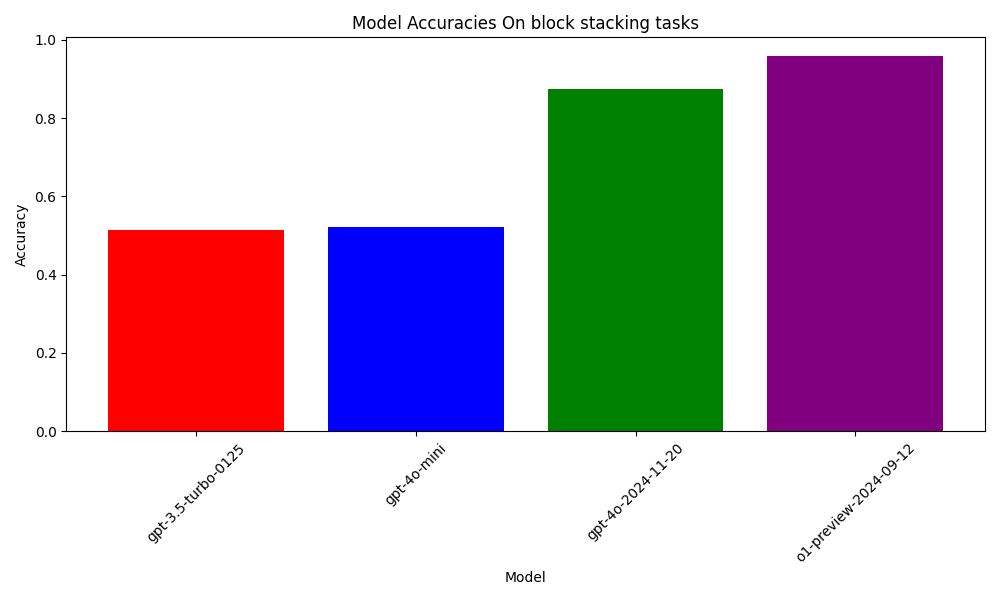
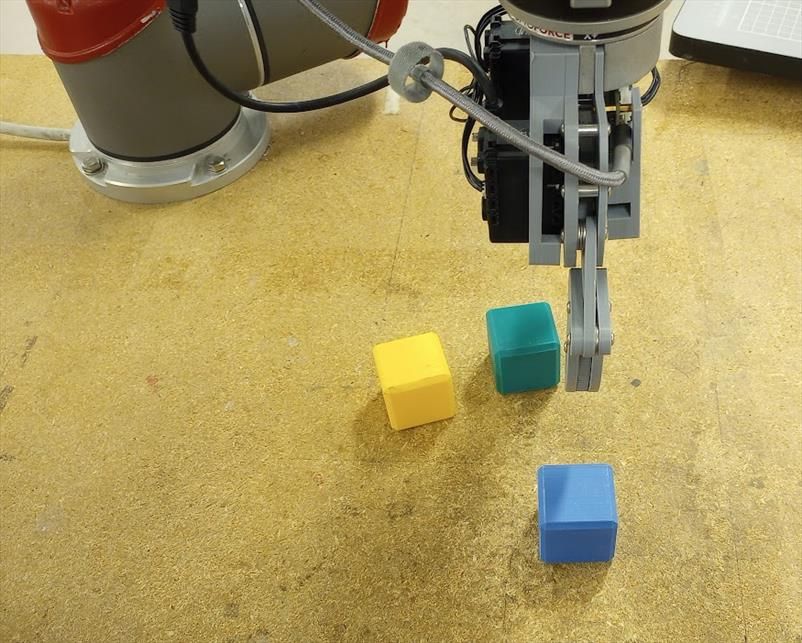
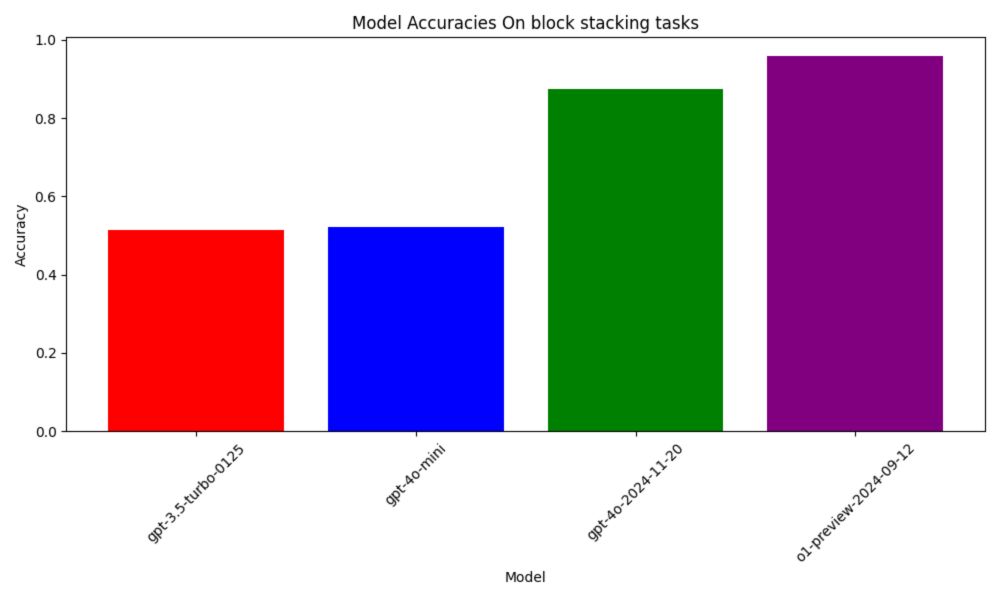
We tested out-of-the-box VLM reasoning for robotic block stacking with ChatGPT4o (95%) a huge step up, but symbolic planning is still needed medium.com/correll-l...
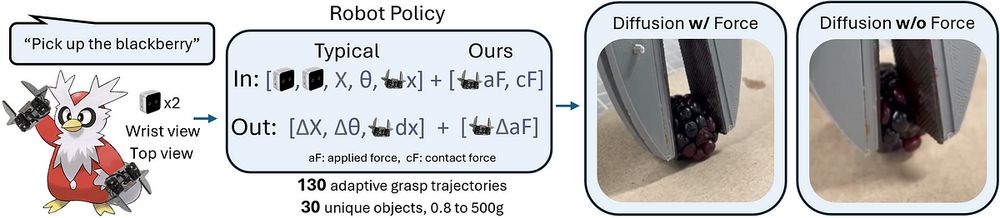
Robot end-to-end learning gets better when including force medium.com/correll-l...
More and more folks discover the power of tactile/force information in end-to-end learning manipulation medium.com/correll-l...

Building CLIP from scratch to identify sport celebrities medium.com/correll-l...
Check out Aritra and Himanshu’s attempt to solve BeliefMDPs with diffusion models medium.com/correll-l...
Two approaches of how to squeeze large (T)VLMs onto a 4090 medium.com/correll-l...
Spectrogram and Vision Transformers a powerful tool for time-series analysis medium.com/correll-l...
A tutorial on training multi-modal end-to-end robot policies with DROID medium.com/correll-l...
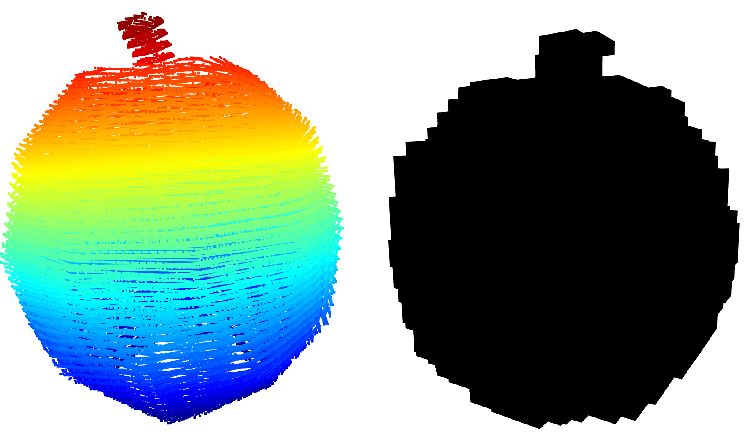
Using ControlNets to condition diffusion to in-paint 3D point clouds for manipulation medium.com/correll-l...
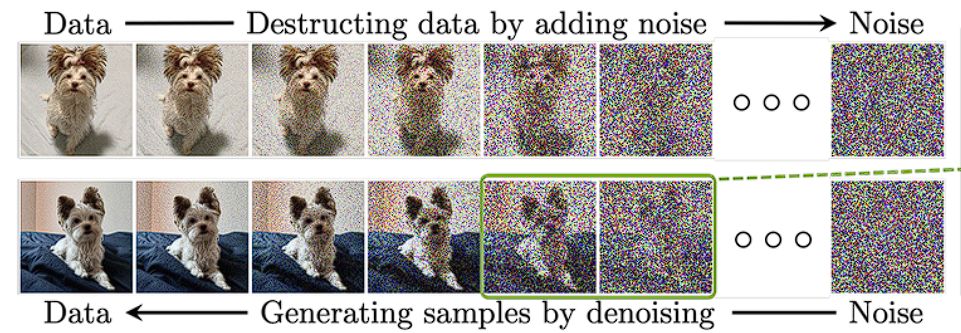
Diffusion models are emerging as an universal frontend in robotic foundation models. Find out how they work in Yutong Zhang’s summary of the original robotic diffusion paper medium.com/correll-l...
Add to that to using blogging and youtube to create accessible versions of their work that can be consumed quickly. (And focussing on a low-ceiling summary will also help during the paper creation process - if the paper cannot be summarized in one sentence why should anyone read it?)
More and more folks discover the power of tactile/force information in end-to-end learning manipulation medium.com/correll-l...
End-to-end learning datasets should include negative examples, check out James Watson’s block-stacking dataset medium.com/correll-l...
Robot end-to-end learning gets better when including force medium.com/correll-l...
Still hoping humanoids will solve the greenfield vs brownfield problem that robots suffer also in this industry
😂
@wxie.bsky.social
Open-source implementation of robot policy with Flow Matching 🔥
github.com/HRI-EU/flow...
Great work from Fan Zhang and Michael Gienger from Honda Research Institute EU!
Great direction!

i read five papers on tactile robot policies and wrote about them: medium.com/correll-lab/...
the first step of me writing my prelim and i hope to have some more interesting synthesis soon. this is in no way a comprehensive review and i welcome recommendations of papers to read!
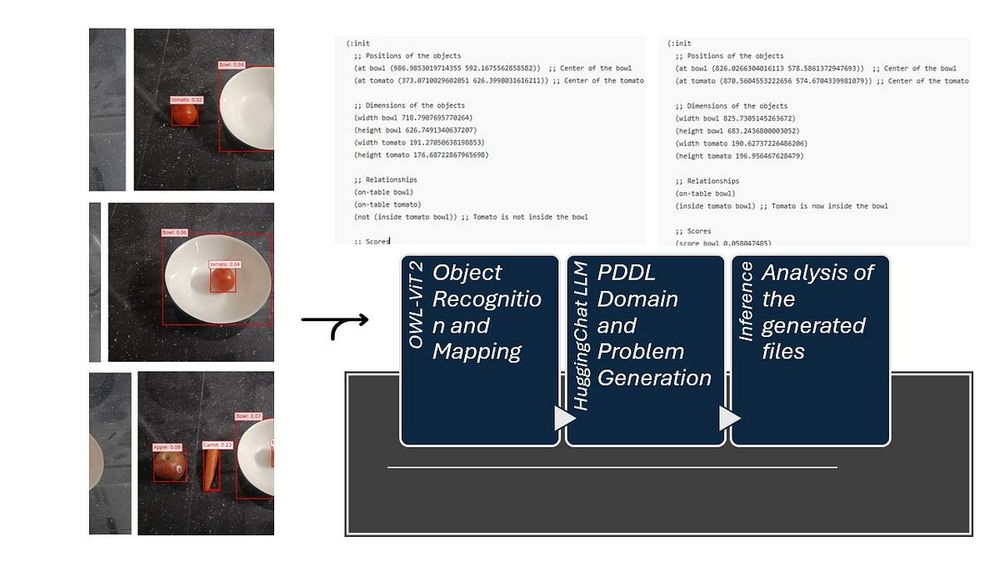
Check out Praneeth Nemani’s work on using VLMs to provide scene understanding to symbolic planning medium.com/correll-l...
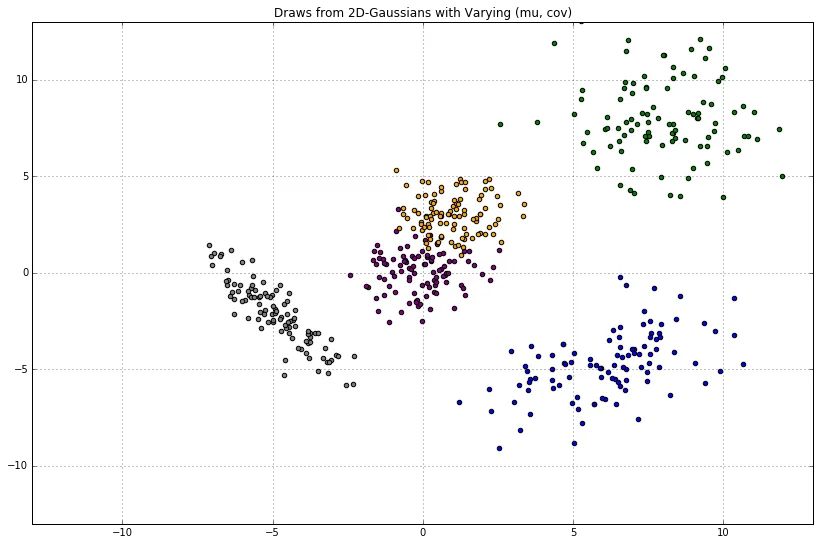
Neural networks do historically bad on sets, check out Himanshu Gupta’s review on set transformers medium.com/correll-l...
Follow and engage with our research on humanoid robots on medium.com/correll-lab
We tested out-of-the-box VLM reasoning for robotic block stacking with ChatGPT4o (95%) a huge step up, but symbolic planning is still needed medium.com/correll-l...
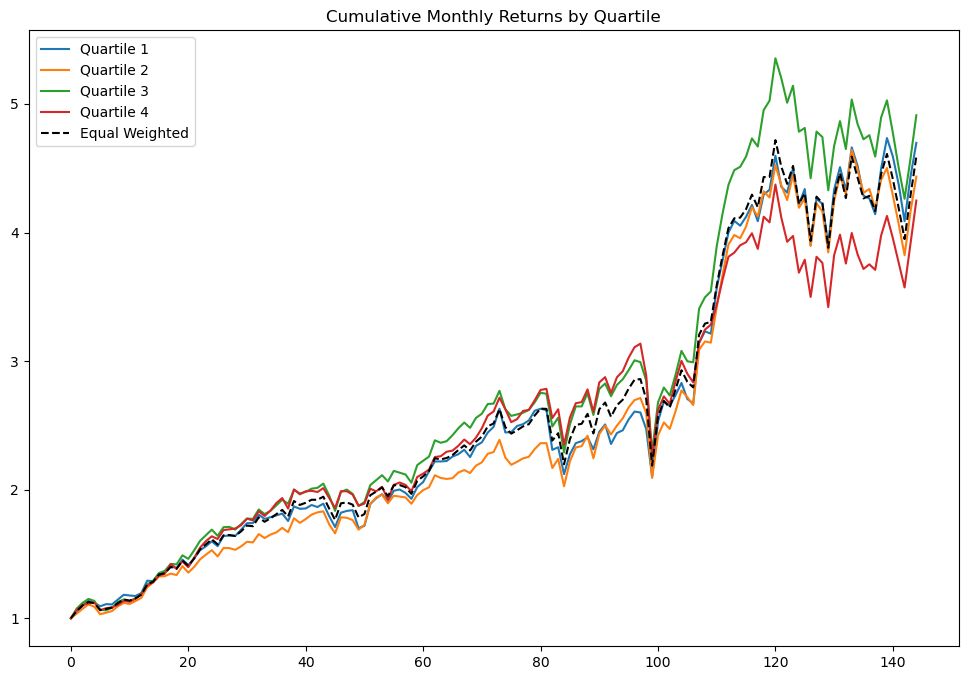
Cool! We just released a benchmark dataset on medium.com/correll-lab/...
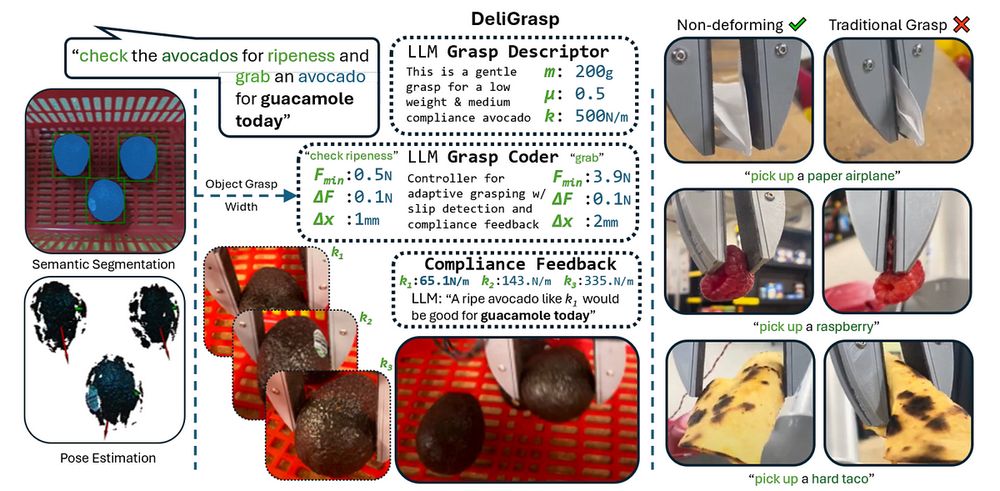
Check out how ChatGPT can provide common sense knowledge for better grasping medium.com/towards-d...
